Расстояние между тремя точками. I
Математика
§2. Координаты точки на плоскости
3. Расстояние между двумя точками.
Мы с вами умеем теперь говорить о точках на языке чисел. Например, нам уже нет необходимости объяснять: возьмите точку, находящуюся на три единицы правее оси и на пять единиц ниже оси . Достаточно сказать просто: возьмите точку .
Мы говорили уже, что это создает определенные преимущества. Так, мы можем рисунок, составленный из точек, передать по телеграфу, сообщить его вычислительной машине, которая совсем не понимает чертежей, а числа понимает хорошо.
В предыдущем пункте мы задали при помощи соотношений между числами некоторые множества точек на плоскости. Теперь попробуем последовательно переводить на язык чисел другие геометрические понятия и факты.
Мы начнем с простой и обычной задачи.
Найти расстояние между двумя точками плоскости.
Решение:
Как всегда, мы считаем, что точки заданы своими координатами, и тогда наша задача состоит в том, чтобы найти правило, по которому можно вычислить расстояние между точками, зная их координаты. При выводе этого правила, конечно, разрешается прибегать к чертежу, но само правило не должно содержать никаких ссылок на чертеж, а должно только показывать, какие действия и в каком порядке надо совершать над данными числами - координатами точек, чтобы получить искомое число - расстояние между точками.
Быть может, некоторым из читателей этот подход к решению задачи покажется странным и надуманным. Чего проще, скажут они, точки заданы, пусть даже координатами. Нарисуйте эти точки, возьмите линейку и измерьте расстояние между ними.
Этот способ иногда не так уж плох. Однако представьте себе опять, что вы имеете дело с вычислительной машиной. В ней нет линейки, и она не рисует, но зато считать она умеет настолько быстро, что это для неё вообще не составляет никакой проблемы. Заметьте, что наша задача поставлена так, чтобы правило вычисления расстояния между двумя точками состояло из команд, которые может выполнить машина.
Поставленную задачу лучше сначала решить для частного случая, когда одна из данных точек лежит в начале координат. Начните с нескольких числовых примеров: найдите расстояние от начала координат точек ; и .
Указание. Воспользуйтесь теоремой Пифагора.
Теперь напишите общую формулу для вычисления расстояния точки от начала координат.
Расстояние точки от начала координат определяется по формуле:
Очевидно, правило, выражаемое этой формулой, удовлетворяет поставленным выше условиям. В частности, им можно пользоваться при вычислении на машинах, которые способны умножать числа, складывать их и извлекать квадратные корни.
Теперь решим общую задачу
Даны две точки плоскости и найти расстояние между ними.
Решение:
Обозначим через , , , проекции точек и на оси координат.
Точку пересечения прямых и обозначим буквой . Из прямоугольного треугольника по теореме Пифагора получаем:
Но длина отрезка равна длине отрезка . Точки и , лежат на оси и имеют соответственно координаты и . Согласно формуле, полученной в п. 3 параграфа 2, расстояние между ними равно .
Аналогично рассуждая, получим, что длина отрезка равна . Подставляя найденные значения и в формулу получаем.
В данной статье рассмотрим способы определить расстояние от точки до точки теоретически и на примере конкретных задач. И для начала введем некоторые определения.
Определение 1
Расстояние между точками – это длина отрезка, их соединяющего, в имеющемся масштабе. Задать масштаб необходимо, чтобы иметь для измерения единицу длины. Потому в основном задача нахождения расстояния между точками решается при использовании их координат на координатной прямой, в координатной плоскости или трехмерном пространстве.
Исходные данные: координатная прямая O x и лежащая на ней произвольная точка А. Любой точке прямой присуще одно действительное число: пусть для точки А это будет некое число х A , оно же – координата точки А.
В целом можно говорить о том, что оценка длины некого отрезка происходит в сравнении с отрезком, принятым за единицу длины в заданном масштабе.
Если точке А соответствует целое действительное число, отложив последовательно от точки О до точки по прямой О А отрезки – единицы длины, мы можем определить длину отрезка O A по итоговому количеству отложенных единичных отрезков.
К примеру, точке А соответствует число 3 – чтобы попасть в нее из точки О, необходимо будет отложить три единичных отрезка. Если точка А имеет координату - 4 – единичные отрезки откладываются аналогичным образом, но в другом, отрицательном направлении. Таким образом в первом случае, расстояние О А равно 3 ; во втором случае О А = 4 .
Если точка A имеет в качестве координаты рациональное число, то от начала отсчета (точка О) мы откладываем целое число единичных отрезков, а затем его необходимую часть. Но геометрически не всегда возможно произвести измерение. К примеру, затруднительным представляется отложить на координатной прямой дробь 4 111 .
Вышеуказанным способом отложить на прямой иррациональное число и вовсе невозможно. К примеру, когда координата точки А равна 11 . В таком случае возможно обратиться к абстракции: если заданная координата точки А больше нуля, то O A = x A (число принимается за расстояние); если координата меньше нуля, то O A = - x A . В общем, эти утверждения справедливы для любого действительного числа x A .
Резюмируя: расстояние от начала отсчета до точки, которой соответствует действительное число на координатной прямой, равно:
- 0, если точка совпадает с началом координат;
- x A , если x A > 0 ;
- - x A , если x A < 0 .
При этом очевидно, что сама длина отрезка не может быть отрицательной, поэтому, используя знак модуля, запишем расстояние от точки O до точки A с координатой x A : O A = x A

Верным будет утверждение: расстояние от одной точки до другой будет равно модулю разности координат. Т.е. для точек A и B , лежащих на одной координатной прямой при любом их расположении и имеющих соответственно координаты x A и x B: A B = x B - x A .

Исходные данные: точки A и B , лежащие на плоскости в прямоугольной системе координат O x y с заданными координатами: A (x A , y A) и B (x B , y B) .
Проведем через точки А и B перпендикуляры к осям координат O x и O y и получим в результате точки проекции: A x , A y , B x , B y . Исходя из расположения точек А и B далее возможны следующие варианты:
Если точки А и В совпадают, то расстояние между ними равно нулю;
Если точки А и В лежат на прямой, перпендикулярной оси O x (оси абсцисс), то точки и совпадают, а | А В | = | А y B y | . Поскольку, расстояние между точками равно модулю разности их координат, то A y B y = y B - y A , а, следовательно A B = A y B y = y B - y A .
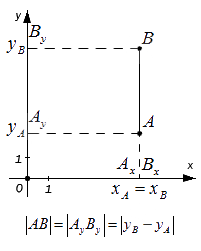
Если точки A и B лежат на прямой, перпендикулярной оси O y (оси ординат) – по аналогии с предыдущим пунктом: A B = A x B x = x B - x A

Если точки A и B не лежат на прямой, перпендикулярной одной из координатных осей, найдем расстояние между ними, выведя формулу расчета:

Мы видим, что треугольник А В С является прямоугольным по построению. При этом A C = A x B x и B C = A y B y . Используя теорему Пифагора, составим равенство: A B 2 = A C 2 + B C 2 ⇔ A B 2 = A x B x 2 + A y B y 2 , а затем преобразуем его: A B = A x B x 2 + A y B y 2 = x B - x A 2 + y B - y A 2 = (x B - x A) 2 + (y B - y A) 2
Сформируем вывод из полученного результата: расстояние от точки А до точки В на плоскости определяется расчётом по формуле с использованием координат этих точек
A B = (x B - x A) 2 + (y B - y A) 2
Полученная формула также подтверждает ранее сформированные утверждения для случаев совпадения точек или ситуаций, когда точки лежат на прямых, перпендикулярных осям. Так, для случая совпадения точек A и B будет верно равенство: A B = (x B - x A) 2 + (y B - y A) 2 = 0 2 + 0 2 = 0
Для ситуации, когда точки A и B лежат на прямой, перпендикулярной оси абсцисс:
A B = (x B - x A) 2 + (y B - y A) 2 = 0 2 + (y B - y A) 2 = y B - y A
Для случая, когда точки A и B лежат на прямой, перпендикулярной оси ординат:
A B = (x B - x A) 2 + (y B - y A) 2 = (x B - x A) 2 + 0 2 = x B - x A
Исходные данные: прямоугольная система координат O x y z с лежащими на ней произвольными точками с заданными координатами A (x A , y A , z A) и B (x B , y B , z B) . Необходимо определить расстояние между этими точками.
Рассмотрим общий случай, когда точки A и B не лежат в плоскости, параллельной одной из координатных плоскостей. Проведем через точки A и B плоскости, перпендикулярные координатным осям, и получим соответствующие точки проекций: A x , A y , A z , B x , B y , B z
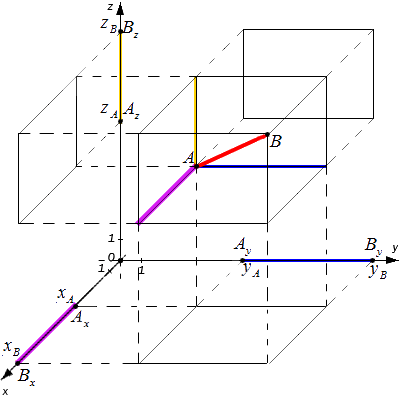
Расстояние между точками A и B являет собой диагональ полученного в результате построения параллелепипеда. Согласно построению измерения этого параллелепипеда: A x B x , A y B y и A z B z
Из курса геометрии известно, что квадрат диагонали параллелепипеда равен сумме квадратов его измерений. Исходя из этого утверждения получим равенство: A B 2 = A x B x 2 + A y B y 2 + A z B z 2
Используя полученные ранее выводы, запишем следующее:
A x B x = x B - x A , A y B y = y B - y A , A z B z = z B - z A
Преобразуем выражение:
A B 2 = A x B x 2 + A y B y 2 + A z B z 2 = x B - x A 2 + y B - y A 2 + z B - z A 2 = = (x B - x A) 2 + (y B - y A) 2 + z B - z A 2
Итоговая формула для определения расстояния между точками в пространстве будет выглядеть следующим образом:
A B = x B - x A 2 + y B - y A 2 + (z B - z A) 2
Полученная формула действительна также для случаев, когда:
Точки совпадают;
Лежат на одной координатной оси или прямой, параллельной одной из координатных осей.
Примеры решения задач на нахождение расстояния между точками
Пример 1Исходные данные: задана координатная прямая и точки, лежащие на ней с заданными координатами A (1 - 2) и B (11 + 2) . Необходимо найти расстояние от точки начала отсчета O до точки A и между точками A и B .
Решение
- Расстояние от точки начала отсчета до точки равно модулю координаты этой точки, соответственно O A = 1 - 2 = 2 - 1
- Расстояние между точками A и B определим как модуль разности координат этих точек: A B = 11 + 2 - (1 - 2) = 10 + 2 2
Ответ: O A = 2 - 1 , A B = 10 + 2 2
Пример 2
Исходные данные: задана прямоугольная система координат и две точки, лежащие на ней A (1 , - 1) и B (λ + 1 , 3) . λ – некоторое действительное число. Необходимо найти все значения этого числа, при которых расстояние А В будет равно 5 .
Решение
Чтобы найти расстояние между точками A и B , необходимо использовать формулу A B = (x B - x A) 2 + y B - y A 2
Подставив реальные значения координат, получим: A B = (λ + 1 - 1) 2 + (3 - (- 1)) 2 = λ 2 + 16
А также используем имеющееся условие, что А В = 5 и тогда будет верным равенство:
λ 2 + 16 = 5 λ 2 + 16 = 25 λ = ± 3
Ответ: А В = 5 , если λ = ± 3 .
Пример 3
Исходные данные: задано трехмерное пространство в прямоугольной системе координат O x y z и лежащие в нем точки A (1 , 2 , 3) и B - 7 , - 2 , 4 .
Решение
Для решения задачи используем формулу A B = x B - x A 2 + y B - y A 2 + (z B - z A) 2
Подставив реальные значения, получим: A B = (- 7 - 1) 2 + (- 2 - 2) 2 + (4 - 3) 2 = 81 = 9
Ответ: | А В | = 9
Если вы заметили ошибку в тексте, пожалуйста, выделите её и нажмите Ctrl+Enter
Расчет расстояний между точками по их координатам на плоскости элементарен, на поверхности Земли — немного посложнее: мы рассмотрим измерение расстояния и начального азимута между точками без проекционных преобразований. Для начала разберемся в терминологии.
Введение
Длина дуги большого круга – кратчайшее расстояние между любыми двумя точками находящимися на поверхности сферы, измеренное вдоль линии соединяющей эти две точки (такая линия носит название ортодромии) и проходящей по поверхности сферы или другой поверхности вращения. Сферическая геометрия отличается от обычной Эвклидовой и уравнения расстояния также принимают другую форму. В Эвклидовой геометрии, кратчайшее расстояние между двумя точками – прямая линия. На сфере, прямых линий не бывает. Эти линии на сфере являются частью больших кругов – окружностей, центры которых совпадают с центром сферы. Начальный азимут - азимут, взяв который при начале движения из точки А, следуя по большому кругу на кратчайшее расстояние до точки B, конечной точкой будет точка B. При движении из точки A в точку B по линии большого круга азимут из текущего положения на конечную точку B постоянно меняется. Начальный азимут отличен от постоянного, следуя которому, азимут из текущей точки на конечную не меняется, но маршрут следования не является кратчайшим расстоянием между двумя точками.Через любые две точки на поверхности сферы, если они не прямо противоположны друг другу (то есть не являются антиподами), можно провести уникальный большой круг. Две точки, разделяют большой круг на две дуги. Длина короткой дуги – кратчайшее расстояние между двумя точками. Между двумя точками-антиподами можно провести бесконечное количество больших кругов, но расстояние между ними будет одинаково на любом круге и равно половине окружности круга, или π*R, где R – радиус сферы.

На плоскости (в прямоугольной системе координат), большие круги и их фрагменты, как было упомянуто выше, представляют собой дуги во всех проекциях, кроме гномонической, где большие круги - прямые линии. На практике это означает, что самолеты и другой авиатранспорт всегда использует маршрут минимального расстояния между точками для экономии топлива, то есть полет осуществляется по расстоянию большого круга, на плоскости это выглядит как дуга.

Форма Земли может быть описана как сфера, поэтому уравнения для вычисления расстояний на большом круге важны для вычисления кратчайшего расстояния между точками на поверхности Земли и часто используются в навигации. Вычисление расстояния этим методом более эффективно и во многих случаях более точно, чем вычисление его для спроектированных координат (в прямоугольных системах координат), поскольку, во-первых, для этого не надо переводить географические координаты в прямоугольную систему координат (осуществлять проекционные преобразования) и, во-вторых, многие проекции, если неправильно выбраны, могу привести к значительным искажениям длин в силу особенностей проекционных искажений. Известно, что более точно описывает форму Земли не сфера, а эллипсоид, однако в данной статье рассматривается вычисление расстояний именно на сфере, для вычислений используется сфера радиусом 6372795 метров, что может привести к ошибке вычисления расстояний порядка 0.5%.
Формулы
Существует три способа расчета сферического расстояния большого круга. 1. Сферическая теорема косинусов В случае маленьких расстояний и небольшой разрядности вычисления (количество знаков после запятой), использование формулы может приводить к значительным ошибкам связанным с округлением. φ1, λ1; φ2, λ2 - широта и долгота двух точек в радианах Δλ - разница координат по долготе Δδ - угловая разница Δδ = arccos {sin φ1 sin φ2 + cos φ1 cos φ2 cos Δλ} Для перевода углового расстояния в метрическое, нужно угловую разницу умножить на радиус Земли (6372795 метров), единицы конечного расстояния будут равны единицам, в которых выражен радиус (в данном случае - метры). 2. Формула гаверсинусов Используется, чтобы избежать проблем с небольшими расстояниями. 3. Модификация для антиподов Предыдущая формула также подвержена проблеме точек-антиподов, чтобы ее решить используется следующая ее модификация.Моя реализация на РНР
// Радиус земли define("EARTH_RADIUS", 6372795); /* * Расстояние между двумя точками * $φA, $λA - широта, долгота 1-й точки, * $φB, $λB - широта, долгота 2-й точки * Написано по мотивам http://gis-lab.info/qa/great-circles.html * Михаил Кобзарев < > * */ function calculateTheDistance ($φA, $λA, $φB, $λB) { // перевести координаты в радианы $lat1 = $φA * M_PI / 180; $lat2 = $φB * M_PI / 180; $long1 = $λA * M_PI / 180; $long2 = $λB * M_PI / 180; // косинусы и синусы широт и разницы долгот $cl1 = cos($lat1); $cl2 = cos($lat2); $sl1 = sin($lat1); $sl2 = sin($lat2); $delta = $long2 - $long1; $cdelta = cos($delta); $sdelta = sin($delta); // вычисления длины большого круга $y = sqrt(pow($cl2 * $sdelta, 2) + pow($cl1 * $sl2 - $sl1 * $cl2 * $cdelta, 2)); $x = $sl1 * $sl2 + $cl1 * $cl2 * $cdelta; // $ad = atan2($y, $x); $dist = $ad * EARTH_RADIUS; return $dist; } Пример вызова функции: $lat1 = 77.1539; $long1 = -139.398; $lat2 = -77.1804; $long2 = -139.55; echo calculateTheDistance($lat1, $long1, $lat2, $long2) . " метров"; // Вернет "17166029 метров"Статья взята с сайта
Расстояние от точки до точки - это длина отрезка, соединяющего эти точки, в заданном масштабе. Таким образом, когда речь идет об измерении расстояния, то требуется знать масштаб (единицу длины), в котором будут проводиться измерения. Поэтому, задачу нахождения расстояния от точки до точки обычно рассматривают либо на координатной прямой, либо в прямоугольной декартовой системе координат на плоскости или в трехмерном пространстве. Другими словами, наиболее часто приходится вычислять расстояние между точками по их координатам.
В этой статье мы, во-первых, напомним, как определяется расстояние от точки до точки на координатной прямой. Далее получим формулы для вычисления расстояния между двумя точками плоскости или пространства по заданным координатам. В заключении, подробно рассмотрим решения характерных примеров и задач.
Навигация по странице.
Расстояние между двумя точками на координатной прямой.
Давайте для начала определимся с обозначениями. Расстояние от точки А до точки В будем обозначать как .

Отсюда можно заключить, что расстояние от точки А
с координатой до точки В
с координатой равно модулю разности координат
, то есть, ![]() при любом расположении точек на координатной прямой.
при любом расположении точек на координатной прямой.

Расстояние от точки до точки на плоскости, формула.
Получим формулу для вычисления расстояния между точками и , заданными в прямоугольной декартовой системе координат на плоскости.
В зависимости от расположения точек А и В возможны следующие варианты.
Если точки А и В совпадают, то расстояние между ними равно нулю.
Если точки А
и В
лежат на прямой, перпендикулярной оси абсцисс, то точки и совпадают, а расстояние равно расстоянию . В предыдущем пункте мы выяснили, что расстояние между двумя точками на координатной прямой равно модулю разности их координат, поэтому, ![]() . Следовательно, .
. Следовательно, .

Аналогично, если точки А и В лежат на прямой, перпендикулярной оси ординат, то расстояние от точки А до точки В находится как .


В этом случае треугольник АВС
– прямоугольный по построению, причем ![]() и . По теореме Пифагора
мы можем записать равенство , откуда .
и . По теореме Пифагора
мы можем записать равенство , откуда .
Обобщим все полученные результаты: расстояние от точки до точки на плоскости находится через координаты точек по формуле
![]() .
.
Полученную формулу для нахождения расстояния между точками, можно использовать когда точки А и В совпадают или лежат на прямой, перпендикулярной одной из координатных осей. Действительно, если А и В совпадают, то . Если точки А и В лежат на прямой, перпендикулярной оси Ох , то . Если А и В лежат на прямой, перпендикулярной оси Оу , то .
Расстояние между точками в пространстве, формула.
Введем прямоугольную систему координат Оxyz
в пространстве. Получим формулу для нахождения расстояния от точки ![]() до точки
до точки ![]() .
.
В общем случае, точки А
и В
не лежат в плоскости, параллельной одной из координатных плоскостей. Проведем через точки А
и В
плоскости, перпендикулярные координатным осям Ох
, Оу
и Oz
. Точки пересечения этих плоскостей с координатными осями дадут нам проекции точек А
и В
на эти оси. Обозначим проекции ![]() .
.

Искомое расстояние между точками А
и В
представляет собой диагональ прямоугольного параллелепипеда, изображенного на рисунке. По построению, измерения этого параллелепипеда равны ![]() и . В курсе геометрии средней школы было доказано, что квадрат диагонали прямоугольного параллелепипеда равен сумме квадратов трех его измерений, поэтому, . Опираясь на информацию первого раздела этой статьи, мы можем записать следующие равенства , следовательно,
и . В курсе геометрии средней школы было доказано, что квадрат диагонали прямоугольного параллелепипеда равен сумме квадратов трех его измерений, поэтому, . Опираясь на информацию первого раздела этой статьи, мы можем записать следующие равенства , следовательно,
откуда получаем формулу для нахождения расстояния между точками в пространстве
.
Эта формула также справедлива, если точки А и В
- совпадают;
- принадлежат одной из координатных осей или прямой, параллельной одной из координатных осей;
- принадлежат одной из координатных плоскостей или плоскости, параллельной одной из координатных плоскостей.
Нахождение расстояния от точки до точки, примеры и решения.
Итак, мы получили формулы для нахождения расстояния между двумя точками координатной прямой, плоскости и трехмерного пространства. Пришло время рассмотреть решения характерных примеров.
Число задач, при решении которых конечным этапом является нахождение расстояния между двумя точками по их координатам, поистине огромно. Полный обзор таких примеров выходит за рамки данной статьи. Здесь мы ограничимся примерами, в которых известны координаты двух точек и требуется вычислить расстояние между ними.
Пусть , (Рисунок 2.3). Требуется найти .
Рисунок 2.3. Расстояние между двумя точками.
Из прямоугольного по теореме Пифагора имеем
То есть ,
Эта формула справедлива при любом расположении точек и .
II. Деление отрезка в данном отношении:
Пусть , . Требуется найти , лежащую на отрезке и делящую его в данном отношении (Рисунок 2.4.).
Рисунок 2.4. Деление отрезка в данном отношении.
Из подобия ~ , то есть , , откуда . Аналогично .
Таким образом,
– формула деления отрезка в отношении .
Если , то
– координаты середины отрезка.
Замечание. Выведенные формулы можно обобщить и на случай пространственной прямоугольной декартовой системы координат. Пусть точки , . Тогда
- формуладля нахождениярасстояния между точками и .
Формула деления отрезка в отношении .
Помимо декартовых на плоскости и в пространстве можно построить большое число других систем координат, то есть способов охарактеризовать положение точки на плоскости или в пространстве с помощью двух или трёх числовых параметров (координат). Рассмотрим некоторые из существующих систем координат.
На плоскости можно определить полярную систему координат , которая применяется, в частности, при исследовании вращательных движений.
Рисунок 2.5. Полярная система координат.
Зафиксируем на плоскости точку и выходящую из нее полупрямую , а также выберем единицу масштаба (Рисунок 2.5). Точка называется полюсом , полупрямая – полярной осью . Произвольной точке поставим в соответствие два числа :
– полярный радиус , равный расстоянию от точки М до полюса О;
– полярный угол , равный углу между полярной осью и полупрямой .
Измеряется в радианах, отсчет положительного направления значений ведется от против часовой стрелки, обычно полагают .
Полюсу соответствует полярный радиус , полярный угол для него не определен.
Найдем зависимость между прямоугольными и полярными координатами (Рисунок 2.6).
Рисунок 2.6. Связь прямоугольной и полярной систем координат.
Будем считать начало координат прямоугольной системы координат полюсом, а луч примем за полярную ось . Пусть - в прямоугольной декартовой системе координат и - в полярной системе координат. Найдем зависимость между прямоугольными и полярными координатами.
Из прямоугольного , а из прямоугольного . Таким образом, формулы
выражают прямоугольные координаты точки через ее полярные координаты.
Обратную зависимость выражают формулы
Замечание. Полярный угол можно определить и из формулы , предварительно определив по прямоугольным координатам, в какой четверти лежит точка.
Пример 1. Найти полярные координаты точки .
Решение. Вычисляем ; полярный угол находим из условий:
Следовательно, , поэтому .
Пример 2. Найти прямоугольные координаты точки .
Решение. Вычисляем
Получаем .
В трёхмерном пространстве помимо прямоугольной декартовой системы координат часто применяются цилиндрическая и сферическая системы координат.
Цилиндрическая система координат – это полярная система координат в плоскости , к которой добавлена пространственная ось , перпендикулярная данной плоскости (Рисунок 2.7). Положение любой точки характеризуется тремя числами – её цилиндрическими координатами: , где и - полярные координаты (полярный радиус и полярный угол) проекции точки на плоскость, в которой выбрана полярная система координат, - аппликата, которая равна расстоянию от точки до указанной плоскости.
Рисунок 2.7. Цилиндрическая система координат
Для установления зависимости между прямоугольной декартовой системой координат и цилиндрической расположим их друг относительно друга как на рисунке 2.8 (плоскость расположим в плоскости , причём полярная ось совпадает с положительным направлением оси , ось общая в обеих системах координат).
Пусть - прямоугольные координаты точки , - цилиндрические координаты этой точки, - проекция точки на плоскость . Тогда
формулы, связывающие прямоугольные и цилиндрические координаты точки.
Рисунок 2.8. Зависимость между прямоугольной декартовой
и цилиндрической системами координат
Замечание. Цилиндрические координаты часто применяются при рассмотрении тел вращения, причём ось располагается по оси вращения.
Сферическая система координат может быть построена следующим образом. Выберем в плоскости полярную ось . Через точку проведём прямую перпендикулярную плоскости (нормаль). Тогда любой точке пространства можно поставить в соответствие три действительных числа , где - расстояние от точки до , - угол между осью и проекцией отрезка на плоскость , - угол между нормалью и отрезком . Заметим, что , , .
Если расположить плоскость в плоскости , причём полярную ось выбрать совпадающей с положительным направлением оси , в качестве нормали выбрать ось (Рисунок 2.9), то получаем формулы связывающие эти две системы координат
Рисунок 2.9. Связь между сферической и прямоугольной декартовой
системами координат
Скалярные величины, или скаляры полностью характеризуются своим численным значением в выбранной системе единиц. Векторные величины или векторы кроме численного значения обладают также направлением. Например, если мы скажем, что дует ветер со скоростью 10 м/сек, то тем самым введем скалярную величину скорости ветра, но если мы скажем, что дует юго-западный ветер со скоростью 10 м/сек, то в этом случае скорость ветра будет уже вектором.
Вектором называется направленный отрезок, имеющий определенную длину, т.е. отрезок определенной длины, у которого одна из ограничивающих точек принимается за начало, а вторая - за конец. Вектор будем обозначать либо , либо (Рисунок 2.10).
Длина вектора обозначается символом или и называется модулем вектора. Вектор, у которого длина равна 1, называется единичным . Вектор называется нулевым , если начало и конец его совпадают, и обозначается θ или . Нулевой вектор не имеет определенного направления и имеет длину, равную нулю. Векторы и , расположенные на одной прямой или на параллельных прямых, называются коллинеарными . Два вектора и называются равными , если они коллинеарны, имеют одинаковую длину и одинаковое направление. Все нулевые векторы считаются равными.
Два коллинеарных вектора, отличные от нулевых, имеющие равные модули, но противоположное направление, называются противоположными . Вектор, противоположный , обозначается , для противоположный вектор .
К числу линейных операций над векторами относят операции сложения, вычитания векторов и умножения вектора на число, т.е. операции, результатом которых является вектор.
Определим указанные операции над векторами. Пусть даны два вектора и . Возьмем произвольную точку О и построим вектор , от точки А отложим вектор . Тогда вектор , соединяющий начало первого слагаемого вектора с концом второго, называется суммой этих векторов и обозначается . Рассмотренное правило нахождения суммы векторов носит название правила треугольников (Рисунок 2.11).
Ту же самую сумму векторов можно получить и иным способом (Рисунок 2.12). Отложим от точки вектор и вектор . Построим на этих векторах как на сторонах параллелограмм . Вектор , являющийся диагональю параллелограмма, проведенной из вершины , и будет суммой . Это правило нахождения суммы носит название правила параллелограмма .
Сумму любого конечного числа векторов можно получить по правилу ломанной (Рисунок 2.13). Из произвольной точки откладываем вектор , далее откладываем вектор и т.д. Вектор, соединяющий начало первого с концом последнего, является суммой
| |
Разностью двух векторов и называется такой вектор , сумма которого с вычитаемым вектором дает вектор . Отсюда правило построения вектора-разности (Рисунок 2.14). Из точки откладываем вектор и вектор . Вектор , соединяющий концы уменьшаемого вектора и вычитаемого вектора и направленный от вычитаемого к уменьшаемому вектору, является разностью .
Произведением вектора на действительное число λ называется вектор , который коллинеарен вектору , имеет длину и то же направление, что и вектор , если , и направление, противоположное вектору , если .
Введенные линейные операции над векторами обладают свойствами :
1 0 . Коммутативность сложения: .
2 0 . Ассоциативность сложения: .
3 0 . Существование нейтрального элемента по сложению: .
4 0 . Существование противоположного элемента по сложению:
5 0 . Дистрибутивность умножения на число относительно сложения векторов: .
6 0 . Дистрибутивность умножения вектора на сумму двух чисел:
7 0 . Свойство ассоциативности относительно умножения вектора на произведение чисел: .
Пусть дана система векторов:
Выражение , где λ i (i = 1,2,…, n) - некоторые числа, называется линейной комбинацией системы векторов (2.1). Система векторов (2.1) называется линейно зависимой , если их линейная комбинация равна нулю при условии, что не все числа λ 1 , λ 2 , …, λ n равны нулю. Система векторов (2.1) называется линейно независимой , если их линейная комбинация равна нулю только при условии, что все числа λ i = 0 (). Можно дать другое определение линейной зависимости векторов. Система векторов (2.1) называется линейно зависимой , если какой-либо вектор этой системы линейно выражается через остальные, в противном случае система векторов (2.1) линейно независима .
Для векторов, лежащих в плоскости, справедливы следующие утверждения.
1 0 . Всякие три вектора на плоскости линейно зависимы.
2 0 . Если число данных векторов на плоскости больше трех, то они также линейно зависимы.
3 0 . Для того, чтобы два вектора на плоскости были линейно независимы, необходимо и достаточно, чтобы они были неколлинеарны.
Таким образом, максимальное число линейно независимых векторов на плоскости равно двум.
Векторы называются компланарными , если они лежат в одной плоскости или параллельны одной плоскости. Для векторов пространства справедливы следующие утверждения.
1 0 . Всякие четыре вектора пространства линейно зависимы.
2 0 . Если число данных векторов в пространстве больше четырех, то они также линейно зависимы.
3 0 . Для того, чтобы три вектора были линейно независимы, необходимо и достаточно, чтобы они были некомпланарны.
Таким образом, максимальное число линейно независимых векторов в пространстве равно трем.
Всякая максимальная подсистема линейно независимых векторов, через которую выражается любой вектор этой системы, называется базисом рассматриваемой системы векторов . Несложно заключить, что базис на плоскости состоит из двух неколлинеарных векторов, а базис в пространстве состоит из трех некомпланарных векторов. Число векторов базиса называется рангом системы векторов. Коэффициенты разложения вектора по векторам базиса называют координатами вектора в данном базисе.
Пусть векторы образуют базис и пусть , тогда числа λ 1 , λ 2 , λ 3 – координаты вектора в базисе В этом случае записывают Можно показать, что разложение вектора по базису является единственным. Основное значение базиса состоит в том, что линейные операции над векторами становятся обычными линейными операциями над числами – координатами этих векторов. С помощью свойств линейных операций над векторами можно доказать следующую теорему.
Теорема. При сложении двух векторов их соответствующие координаты складываются. При умножении вектора на число все его координаты умножаются на это число.
Таким образом, если и , то , где , и где , λ – некоторое число.
Обычно множество всех векторов на плоскости, приведенных к общему началу, с введенными линейными операциями обозначают V 2 , а множество всех векторов пространства, приведенных к общему началу, обозначают V 3 . Множества V 2 и V 3 называют пространствами геометрических векторов.
Углом между векторами и называется наименьший угол (), на который надо повернуть один из векторов до его совпадения со вторым после приведения этих векторов к общему началу.
Скалярным произведением двух векторов называется число, равное произведению модулей этих векторов на косинус угла между ними. Скалярное произведение векторов и обозначают , или
Если угол между векторами и равен , то
С геометрической точки зрения скалярное произведение векторов равно произведению модуля одного вектора на проекцию на него другого вектора. Из равенства (2.2) следует, что
Отсюда условие ортогональности двух векторов: два вектора и ортогональны тогда и только тогда, когда их скалярное произведение равно нулю, т.е. .
Скалярное произведение векторов не является линейной операцией, так как ее результатом является число, а не вектор.
Свойства скалярного произведения.
1º. – коммутативность.
2º. – дистрибутивность.
3º. – ассоциативность относительно числового множителя.
4º. - свойство скалярного квадрата.
Из свойства 4º следует определение длины вектора :
Пусть в пространстве V 3 задан базис , где векторы – единичные векторы (их называют ортами), направление каждого их которых совпадает с положительным направлением координатных осей Ох, Oy, Oz прямоугольной декартовой системы координат.
Разложим вектор пространства V 3 по этому базису (Рисунок 2.15):
Векторы называют составляющими вектора по осям координат, или компонентами, числа a x , a y , a z – прямоугольные декартовы координаты вектора а . Направление вектора определяется углами α, β, γ, образованными им с координатными прямыми. Косинус этих углов называют направляющими вектора . Тогда направляющие косинусы определяются по формулам:
Несложно показать, что
Выразим скалярное произведение в координатной форме.
Пусть и . Перемножая эти векторы как многочлены и учитывая, что получим выражение для нахождения скалярного произведения в координатной форме :
т.е. скалярное произведение двух векторов равно сумме парных произведений одноименных координат.
Из (2.6) и (2.4) следует формула для нахождения длины вектора :
Из (2.6) и (2.7) получаем формулу для определения угла между векторами :
Тройка векторов называется упорядоченной, если указано, какой из них считается первым, какой – вторым, а какой третьим.
Упорядоченная тройка векторов называется правой , если после приведения их к общему началу из конца третьего вектора кратчайший поворот от первого ко второму вектору совершается против часовой стрелки. В противном случае тройка векторов называется левой . Например, на рисунке 2.15 векторы , , образуют правую тройку векторов, а векторы , , - левую тройку векторов.
Аналогичным образом вводится понятие правой и левой систем координат в трехмерном пространстве.
Векторным произведением вектора на вектор называется вектор (другое обозначение ), который:
1) имеет длину , где – угол между векторами и ;
2) перпендикулярен векторам и (), т.е. перпендикулярен плоскости, в которой лежат векторы и ;
По определению найдём векторное произведение координатных ортов , , :
Если , , то координаты векторного произведения вектора на вектор определяются по формуле:
Из определения следует геометрический смысл векторного произведения : модуль вектора равен площади параллелограмма, построенного на векторах и .
Свойства векторного произведения:
4 0 . , если векторы и коллинеарны, или один из этих векторов нулевой.
Пример 3. Параллелограмм построен на векторах и , где , , . Вычислить длину диагоналей этого параллелограмма, угол между диагоналями и площадь параллелограмма.
Решение. Построение векторов и показано на рисунке 2.16, построение параллелограмма на этих векторах показано на рисунке 2.17.
Проведём аналитическое решение этой задачи. Выразим вектора, определяющие диагонали построенного параллелограмма, через векторы и , а затем через и . Находим , . Далее находим длины диагоналей параллелограмма, как длины построенных векторов
Угол между диагоналями параллелограмма обозначим через . Тогда из формулы скалярного произведения векторов имеем:
Следовательно, .
Используя свойства векторного произведения, вычислим площадь параллелограмма:
Пусть даны три вектора , и . Представим себе, что вектор умножается векторно на и вектор и полученный вектор умножается скалярно на вектор , тем самым определяется число . Оно называется векторно-скалярным или смешанным произведением трёх векторов , и . Обозначается или .
Выясним геометрический смысл смешанного произведения (Рисунок 2.18). Пусть , , не компланарны. Построим на этих векторах параллелепипед как на ребрах. Векторное произведение есть вектор , модуль которого равен площади параллелограмма (основание параллелепипеда), построенного на векторах и и направлен перпендикулярно к плоскости параллелограмма.
Скалярное произведение (равно произведению модуля вектора и проекции на ). Высота построенного параллелепипеда есть абсолютная величина этой проекции. Следовательно, абсолютная величина смешанного произведения трёх векторов равна объёму параллелепипеда, построенного на векторах , и , т.е. .
Отсюда объем треугольной пирамиды , построенной на векторах , и , вычисляется по формуле .
Отметим ещё некоторые свойства смешанного произведения векторов.
1 о. Знак произведения положителен, если векторы , , образуют систему, одноименную с основной, и отрицателен в противном случае.
Действительно , скалярное произведение положительно, если угол между и острый и отрицательно, если угол тупой. При остром угле между и векторы и расположены по одну сторону относительно основания параллелепипеда, и следовательно, из конца вектора вращение от к будет видно так же, как из конца вектора , т.е. в положительном направлении (против часовой стрелки).
При тупом угле и векторы и расположены по разные стороны относительно плоскости параллелограмма, лежащего в основании параллелепипеда, и следовательно, из конца вектора вращение от к видно в отрицательном направлении (по часовой стрелке).
2 о Смешанное произведение не меняется при круговой перестановке его сомножителей: .
3 о При перестановке любых двух векторов смешанное произведение изменяет только знак. Например, , . , . - неизвестные системы.
Система (3.1) называется однородной , если все свободные члены . Система (3.1) называется неоднородной , если хотя бы один из свободных членов .
Решением системы называется совокупность чисел , при подстановке которых в уравнения системы вместо соответствующих неизвестных каждое уравнение системы превращается в тождество. Система, не имеющая ни одного решения, называется несовместной, или противоречивой . Система, имеющая хотя бы одно решение, называется совместной .
Совместная система называется определенной , если она имеет единственное решение. Если совместная система имеет более одного решения, то она называется неопределенной . Однородная система всегда совместна, так как имеет, по крайней мере, нулевое решение . Выражение для неизвестных , из которого можно получить любое конкретное решение системы, называют ее общим решением , а любое конкретное решение системы – ее частным решением . Две системы с одними и теми же неизвестными эквивалентны (равносильны ), если каждое решение одной из них является решением другой или обе системы несовместны.
Рассмотрим методы решения систем линейных уравнений.
Одним из основных методов решения систем линейных уравнений является метод Гаусса, или метод последовательного исключения неизвестных. Суть этого метода состоит в сведении системы линейных уравнений к ступенчатому виду. При этом над уравнениями приходится проводить следующие элементарные преобразования :
1. Перестановка уравнений системы.
2. Прибавление к одному уравнению другого уравнения.
3. Умножение обеих частей уравнения на число, отличное от нуля.
В результате система примет вид:
Продолжая этот процесс дальше, исключим неизвестную из всех уравнений, начиная с третьего. Для этого умножим второе уравнение на числа и добавим к 3-му, ..., к - му уравнению системы. Следующие шаги метода Гаусса осуществляются аналогично. Если в результате преобразований получится тождественное уравнение, то вычеркнем его из системы. Если на некотором шаге метода Гаусса получается уравнение вида:
тогда рассматриваемая система несовместна и дальнейшее ее решение прекращается. Если же уравнение вида (3.2) не встретится при выполнении элементарных преобразований, то не более чем через - шагов система (3.1) будет преобразована к ступенчатому виду:
Для получения частного решения системы необходимо будет в (3.4) придать свободным переменным конкретные значения.
Заметим, что так как в методе Гаусса все преобразования выполняются над коэффициентами при неизвестных уравнений и свободными членами, то на практике обычно этот метод применяют к матрице, составленной из коэффициентов при неизвестных и столбца свободных членов. Эту матрицу называют расширенной. С помощью элементарных преобразований эту матрицу сводят к ступенчатому виду. После чего по полученной матрице восстанавливают систему и применяют к ней все предыдущие рассуждения.
Пример 1. Решить систему:
Решение. Составляем расширенную матрицу и сводим ее к ступенчатому виду:
~ *) ~ **) ~ ***)
*) - вторую строку умножили на и вычеркнули третью строку.
Сегодняшний материал посвящается истинным гурманам, которые кроме российской кухни желают окунуться в восточную. Фалафель – это традиционное израильское блюдо, рецепт приготовления которого переняли наши соотечественники. Сделать его в домашних условиях н
Опята – удивительные плодовые тела, которые содержат много белка и мало калорий. Эти свойства высоко ценятся в кулинарии многих стран, а кроме того, данные грибы могут успешно «соперничать» с мясом и рыбой. Ценители грибных блюд любят опята не только за и
Как сделать заготовку из томатов на зиму «два в одном»? Очень просто - закрыть помидоры в томатном соке на зиму, чтобы получить и вкусные консервированные овощи, и сок, который можно пить. Вариантов таких заготовок очень много, красные сочные помидоры мож






